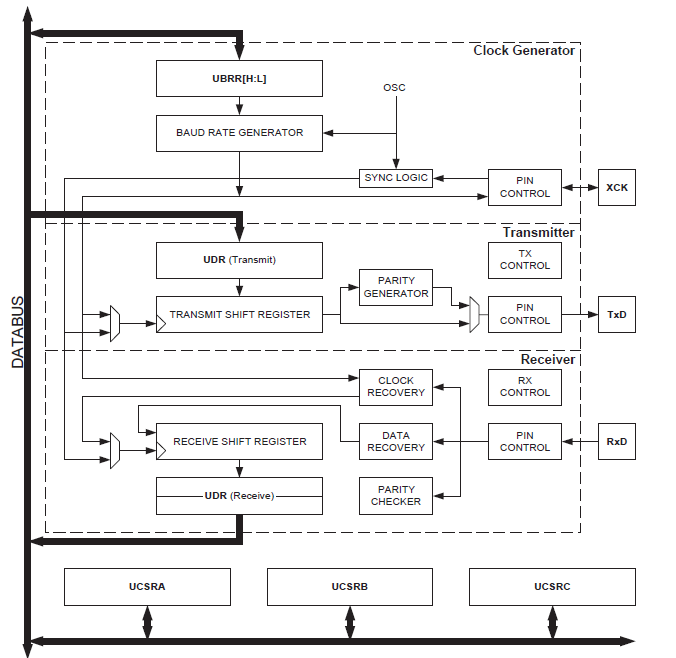
Blokové schéma USART
Komunikace RS232 a USB
Výstupy s procesoru jsou vždy v úrovni TTL, tzn. logická 0 je cca 0V a logická 1 je 5V (3,3V). Pro připojení s PC je nutný napěťový převod na specifikace RS232 nebo USB. Pro RS232 je vývojový kit vybaven obvodem MAX232 a pro komunikaci přes USB obvodem FT232R.
Sběrnice I2C
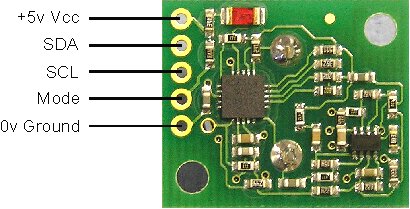
Sběrnice I2C je v procesorech Atmel označována jako TWI (Two Wire Interface) . Vlastní přenos využívá dvou vodičů a to SDA po kterém se přenáší data a SCL pro přenos hodinového signálu. Komunikace probíhá typem Master - Slave, kde každé zařízení má svoji adresu (vice zařízení na lince). U některých obvodů je komunikace TWI řešena softwarově, ale vlastni program je složitý a hlavně zabírá místo v paměti. U procesoru ATmega 128 je komunikace řešena hardwarově jak ukazuje následující blokové schéma.

Inicializace USART pro RS232
ISR(USART0_RX_vect)
{
}
Ovládání senzoru SRF02
Příkazové registry
Datové registry
Výstupy s procesoru jsou vždy v úrovni TTL, tzn. logická 0 je cca 0V a logická 1 je 5V (3,3V). Pro připojení s PC je nutný napěťový převod na specifikace RS232 nebo USB. Pro RS232 je vývojový kit vybaven obvodem MAX232 a pro komunikaci přes USB obvodem FT232R.
Sběrnice I2C
Sběrnice I2C je v procesorech Atmel označována jako TWI (Two Wire Interface) . Vlastní přenos využívá dvou vodičů a to SDA po kterém se přenáší data a SCL pro přenos hodinového signálu. Komunikace probíhá typem Master - Slave, kde každé zařízení má svoji adresu (vice zařízení na lince). U některých obvodů je komunikace TWI řešena softwarově, ale vlastni program je složitý a hlavně zabírá místo v paměti. U procesoru ATmega 128 je komunikace řešena hardwarově jak ukazuje následující blokové schéma.
Inicializace USART pro RS232
void uart_init (void)Vektor přerušení pro příjem znaku
{
// USART0 initialization
// Communication Parameters: 8 Data, 1 Stop, No Parity
// USART0 Receiver: On
// USART0 Transmitter: On
// USART0 Mode: Asynchronous
// USART0 Baud Rate: 9600
UCSR0A=0x00;
UCSR0B=0x18; //bez preruseni
//UCSR0B=0x98; // s prerusenim na prijem znaku (nutny vektor preruseni, globalne preruseni povolit a knihovna preruseni)
UCSR0C=0x06;
UBRR0H=0x00;
UBRR0L=0x5F;
}
ISR(USART0_RX_vect)
{
}
Ovládání senzoru SRF02
Příkazové registry
| Command | Action | |
| Decimal | Hex | |
| 80 | 0x50 | Real Ranging Mode - Result in inches |
| 81 | 0x51 | Real Ranging Mode - Result in centimeters |
| 82 | 0x52 | Real Ranging Mode - Result in micro-seconds |
| 86 | 0x56 | Fake Ranging Mode - Result in inches |
| 87 | 0x57 | Fake Ranging Mode - Result in centimeters |
| 88 | 0x58 | Fake Ranging Mode - Result in micro-seconds |
| 92 | 0x5C | Transmit an 8 cycle 40khz burst - no ranging takes place |
| 96 | 0x60 | Force Autotune Restart - same as power-up. You can ignore this command. |
| 160 | 0xA0 | 1st in sequence to change I2C address |
| 165 | 0xA5 | 3rd in sequence to change I2C address |
| 170 | 0xAA | 2nd in sequence to change I2C address |
Datové registry
|
Location |
Read |
Write |
|
0 |
Software Revision |
Command Register |
|
1 |
Unused (reads 0x80) |
N/A |
|
2 |
Range High Byte |
N/A |
|
3 |
Range Low Byte |
N/A |
| 4 | Autotune Minimum - High Byte | N/A |
| 5 | Autotune Minimum - Low Byte | N/A |
Funkce pro I2C (knihovna twi_lib.h)
i2c_init() - Inicializace I2C
i2c_start_wait() - komunikace pro konkrétní adresu I2C zařízení
i2c_write(); - zápis na adresu
i2c_rep_start() - oslovení zařízení pro čtení
i2c_readNak() - načtení znaku
i2c_stop() - ukončení komunikace I2C
#define F_CPU 16000000UL
#include <avr/io.h>
#include <string.h>
#include <util/delay.h>
#include <avr/interrupt.h>
volatile unsigned char prerus=0;
volatile unsigned char muj_b;
char tempstr[12],znak;
//*******************************************************************************************
// MOJE UPRAVY
//-------------------------------------------------------------------------------------------
//
#define setb(port,pin) port |= 1<<pin //nastav bit
#define clrb(port,pin) port &= ~(1<<pin) //nuluj bit
#define negb(port,pin) port ^= 1<<pin //neguj bit
//*******************************************************************************************
//UART ATmega 128
//*******************************************************************************************
// Funkce pro UART:
void init_uart (unsigned int baud); //inicializace UART
unsigned char u_getc( void ); //přijmi znak z UART
void u_putc( char data ); //napiš znak do UART
void u_puts( char *text ); //napiš string do UART
// UART pošli znak:
void u_putc( char data )
{
while ( !( UCSR0A & (1<<UDRE)) ) // Wait for empty transmit buffer
;
UDR0 = data; // Put data into buffer, sends the data
}
// UART pošli string:
void u_puts( char *text )
{
unsigned char i=0,temp;
do
{
temp = text[i];
if(temp==0) break;
u_putc(temp);
i++;
}
while(temp>0);
}
// UART přijmi znak:
unsigned char u_getc( void )
{
while ( !(UCSR0A & (1<<RXC)) ) // Wait for data to be received
;
return UDR0; // Get and return received data from buffer
}
// u_puts(tempstr);
// u_puts("\r\n"); // odřádkuj
// Inicializace na 9600 pro 16MHZ
/*
UCSR0A=0x00;
UCSR0B=0x18;
UCSR0C=0x06;
UBRR0H=0x00;
UBRR0L=0x67;
char tempstr[12],znak;
*/
//******************************************************************************************
ISR(USART0_RX_vect)
{
prerus=1;
muj_b = UDR0;
}
void main(void)
{
// Inicializace UART na 9600 pro 16MHZ
UCSR0A=0x00;
//UCSR0B=0x18; bez preruseni
UCSR0B=0x98;
UCSR0C=0x06;
UBRR0H=0x00;
UBRR0L=0x67;
PORTB=0; // zablikani na zacatku
_delay_ms(50);
PORTB=255;
_delay_ms(50);
PORTB=0;
_delay_ms(50);
PORTB=255;
_delay_ms(50);
sei();
while (1)
{
if (prerus==1)
{
u_puts("Obdrzel jsem:");
u_putc(muj_b);
u_puts("\r\n"); // odřádkuj
}
};
}
Příklad 2
Do příkladu 1 přidáme načtení vzdálenosti :
#define U1 0xE0 // ADRESA
i2c_init();
i2c_start_wait(U1+I2C_WRITE); // (adresa+bit pro zapis)
i2c_write(0x00); // zapis na tuto adresu ...
i2c_write(81); // tohle (81 start mereni v cm)
_delay_ms(70); // cekani na konec mereni min 63ms
/// precti vzdalenost 1. (byte 2 a 3)
i2c_start_wait(U1+I2C_WRITE);
i2c_write(3); //1. vydalenost L
i2c_rep_start(U1+I2C_READ); // (adresa+bit pro cteni)
vzdalenostL=i2c_readNak() ; // precteni jednoho B a ulozeni do promenne
i2c_write(2); //1. vydalenost H
i2c_rep_start(U1+I2C_READ);
vzdalenostH=i2c_readNak() ;
i2c_stop();
vzdalenost=(vzdalenostH*256)+vzdalenostL ;
i2c_init() - Inicializace I2C
i2c_start_wait() - komunikace pro konkrétní adresu I2C zařízení
i2c_write(); - zápis na adresu
i2c_rep_start() - oslovení zařízení pro čtení
i2c_readNak() - načtení znaku
i2c_stop() - ukončení komunikace I2C
Řešení
Příklad 1#define F_CPU 16000000UL
#include <avr/io.h>
#include <string.h>
#include <util/delay.h>
#include <avr/interrupt.h>
volatile unsigned char prerus=0;
volatile unsigned char muj_b;
char tempstr[12],znak;
//*******************************************************************************************
// MOJE UPRAVY
//-------------------------------------------------------------------------------------------
//
#define setb(port,pin) port |= 1<<pin //nastav bit
#define clrb(port,pin) port &= ~(1<<pin) //nuluj bit
#define negb(port,pin) port ^= 1<<pin //neguj bit
//*******************************************************************************************
//UART ATmega 128
//*******************************************************************************************
// Funkce pro UART:
void init_uart (unsigned int baud); //inicializace UART
unsigned char u_getc( void ); //přijmi znak z UART
void u_putc( char data ); //napiš znak do UART
void u_puts( char *text ); //napiš string do UART
// UART pošli znak:
void u_putc( char data )
{
while ( !( UCSR0A & (1<<UDRE)) ) // Wait for empty transmit buffer
;
UDR0 = data; // Put data into buffer, sends the data
}
// UART pošli string:
void u_puts( char *text )
{
unsigned char i=0,temp;
do
{
temp = text[i];
if(temp==0) break;
u_putc(temp);
i++;
}
while(temp>0);
}
// UART přijmi znak:
unsigned char u_getc( void )
{
while ( !(UCSR0A & (1<<RXC)) ) // Wait for data to be received
;
return UDR0; // Get and return received data from buffer
}
// u_puts(tempstr);
// u_puts("\r\n"); // odřádkuj
// Inicializace na 9600 pro 16MHZ
/*
UCSR0A=0x00;
UCSR0B=0x18;
UCSR0C=0x06;
UBRR0H=0x00;
UBRR0L=0x67;
char tempstr[12],znak;
*/
//******************************************************************************************
ISR(USART0_RX_vect)
{
prerus=1;
muj_b = UDR0;
}
void main(void)
{
// Inicializace UART na 9600 pro 16MHZ
UCSR0A=0x00;
//UCSR0B=0x18; bez preruseni
UCSR0B=0x98;
UCSR0C=0x06;
UBRR0H=0x00;
UBRR0L=0x67;
PORTB=0; // zablikani na zacatku
_delay_ms(50);
PORTB=255;
_delay_ms(50);
PORTB=0;
_delay_ms(50);
PORTB=255;
_delay_ms(50);
sei();
while (1)
{
if (prerus==1)
{
u_puts("Obdrzel jsem:");
u_putc(muj_b);
u_puts("\r\n"); // odřádkuj
}
};
}
Příklad 2
Do příkladu 1 přidáme načtení vzdálenosti :
#define U1 0xE0 // ADRESA
i2c_init();
i2c_start_wait(U1+I2C_WRITE); // (adresa+bit pro zapis)
i2c_write(0x00); // zapis na tuto adresu ...
i2c_write(81); // tohle (81 start mereni v cm)
_delay_ms(70); // cekani na konec mereni min 63ms
/// precti vzdalenost 1. (byte 2 a 3)
i2c_start_wait(U1+I2C_WRITE);
i2c_write(3); //1. vydalenost L
i2c_rep_start(U1+I2C_READ); // (adresa+bit pro cteni)
vzdalenostL=i2c_readNak() ; // precteni jednoho B a ulozeni do promenne
i2c_write(2); //1. vydalenost H
i2c_rep_start(U1+I2C_READ);
vzdalenostH=i2c_readNak() ;
i2c_stop();
vzdalenost=(vzdalenostH*256)+vzdalenostL ;